+86-13073105066
admin@longshubearing.com







Products





-

Bearings for metallurgical rolling mills
-

Automotive Bearings-Wheel Bearings
-

Automotive Bearings-Gearbox Bearings
-

NSK brand bearings
-

Ceramic bearings with silicon nitride balls
-

Mountain bike bearings
-

High speed corrosion resistant bearings
-

Automotive Bearings - Clutch Release Bearings
-

INA brand bearings
-

Oilfield bearings
-

Customized bearings
-

Automotive bearings-Repair steering gear bearings
-
Electrically insulated bearings
-

FAG brand bearings
-

Bearings for wind power
-

Stainless steel bearings




















Bearings for robots and manipulators
Robot bearings are key components of industrial robots. They are mainly used in manipulator joints, rotary units and precision rotary tables. Their characteristics directly affect the smooth running, repeatable positioning and operational reliability of the robot.
Description
marker
Product Description
Robot bearings are key components of industrial robots. They are mainly used in manipulator joints, rotary units and precision rotary tables. Their characteristics directly affect the smooth running, repeatable positioning and operational reliability of the robot. The main types include cross roller bearings, thin wall bearings, wave gear bearings and plain bearings. Among them, cross-roller bearings occupy a leading position because they are able to simultaneously absorb radial and axial loads, as well as overturning moment. Some products use technologies such as silicon nitride ceramic beads and superfinishing surface treatments to enhance performance.
Industrial robot bearings are mainly divided into thin-wall equal bearings, cross roller bearings, wave gear bearings, plain bearings, RV gear bearings, as well as electric motor bearings and lead screw bearings.
Design technology
The design principle for bearings that are components of industrial robots should provide for multi-criteria optimization, in which three indicators are taken as objective functions: nominal dynamic load capacity, rigidity and friction moment. Key technologies include rolling contact theory, dynamic load analysis, thermal analysis and reliability assessment. Rolling contact theory describes the contact stresses and deformation behavior of rolling surfaces, allowing the fatigue life and load-bearing capacity of a bearing to be predicted. Dynamic load analysis models the performance of a bearing under dynamic loading conditions. Thermal analysis allows you to predict the temperature distribution and thermal stresses in the bearing, ensuring its stability and reliability at high temperatures. Reliability assessment based on probabilistic models and statistical analysis allows you to predict and prevent potential failures.
Manufacturing technology and precision machining
Key technologies for the production of robot bearings include: technology for precise control of negative clearance in thin-walled bearings; control of the mounting height of thin-walled angular contact ball bearings; technology for assembling thin-walled bearings; technology for non-contact measurement of the inner and outer diameters of thin-walled bearing rings. Specific processes also include: technology for fine grinding of bearing rings based on control of the grinding work hardening layer; hot isostatic pressing, which reduces residual stresses in the bearing by 60%; hardening in a controlled atmosphere, ensuring control of deformation within 0.02 mm.
")
")
")
")
contact us
Related Popular Products
Mountain bike bearings
Mountain bike bearings are one of the key components that influence riding comfort. They are usually hidden in components such as bushings, carriages, and steering columns, and although unnoticeable, they perform an important function in reducing friction and ensuring smooth rotation of parts. Knowing the types of bearings, as well as their maintenance and replacement, helps keep your bike in good condition and extends its life.
Electrically insulated bearings
Electrically insulated bearings use a special spraying process to apply a high-quality coating to the outer surface of the bearing.
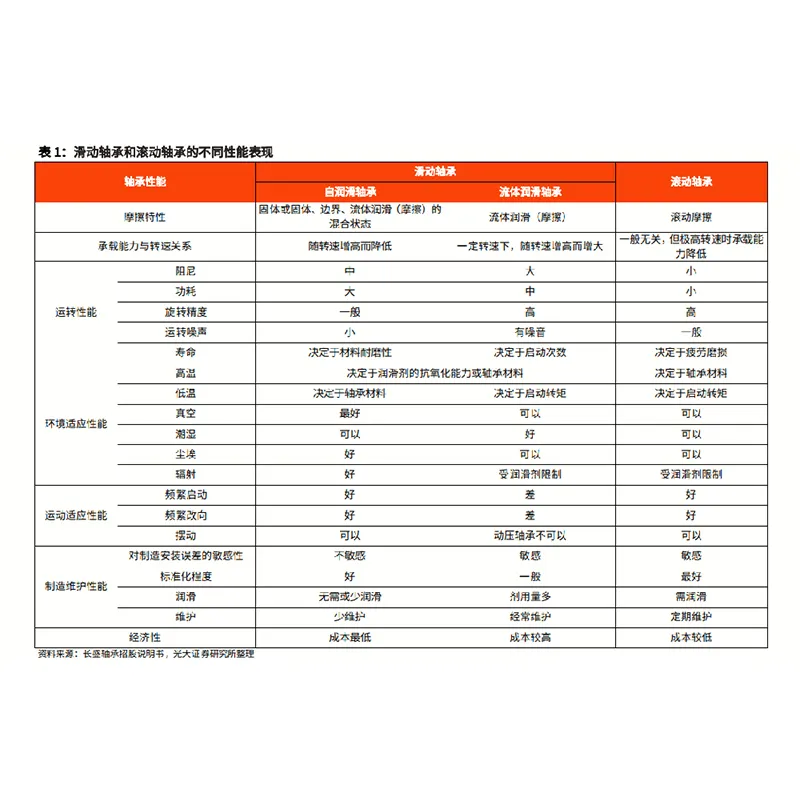
Bearings for metallurgical rolling mills
Roll bearings are another name for metallurgical rolling mill bearings. They are key components designed to support the mill rolls and keep them in the correct position in the stand. Roll bearings are mainly divided into plain bearings and rolling bearings, and must have the characteristics of low friction, high strength and moderate rigidity.
Customized bearings
It is possible to manufacture bearings of any models and sizes according to individual customer requirements.
Ceramic bearings with silicon nitride balls
Ceramic ball bearings are industrial bearings in which the rolling elements are ceramic materials. They usually use a combined design of ceramic balls (hot-pressed silicon nitride Si₃N₄ or zirconium dioxide) and metal rings.
Automotive Bearings-Wheel Bearings
The wheel bearing is one of the key components of a car. Its main function is to carry weight and provide precise direction of rotation of the hub, which requires it to be able to withstand both axial and radial loads.
Oilfield bearings
Product range: deep groove ball bearings, cylindrical roller bearings, spherical roller bearings, tapered roller bearings, thrust roller bearings, angular contact ball bearings, thrust ball bearings, oil equipment bearings, railway locomotive bearings, gearbox bearings, hydraulic pump bearings, truck wheel bearings automobiles, rolling mill bearings, split bearings, precision bearings for machine tools, as well as a range of metric and inch precision bearings.
High speed corrosion resistant bearings
High-speed bearings are rolling bearings whose Dmn value exceeds 1.0×10⁶ mm·rpm. Their performance characteristics are determined by the product of the average diameter Dm and the rotational speed of the inner ring n; They are designed for high precision and high speed applications.
INA brand bearings
Imported bearings are a concept contrasted with Chinese-made bearings. Imported bearings not only provide strong brand support, advanced scientific concepts and innovation, but also perfect after-sales service and strong expansion of product range.

Bearings for UAVs
Bearings used in unmanned aerial vehicles must meet the requirements of lightness, high rotation speed, low friction and corrosion resistance.
FAG brand bearings
Imported bearings are a concept contrasted with Chinese-made bearings. Imported bearings not only provide strong brand support, advanced scientific concepts and innovation, but also perfect after-sales service and strong expansion of product range.
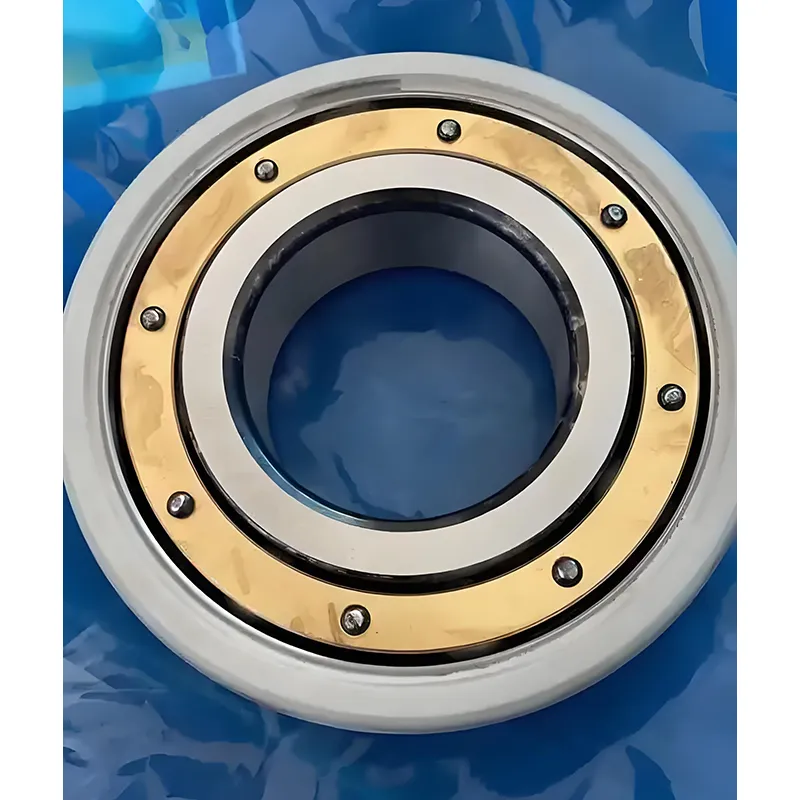
Bearings for linear guides
A linear guide, also known as linear rail, sliding guide and linear guide rail, is a device used to guide mechanical components in a given direction to achieve high-precision, low-friction linear movement.
Stainless steel bearings
Compared to conventional bearings, stainless steel bearings have obvious advantages not only in terms of material, but also in terms of technology and precision control: the requirements for them are much stricter than for conventional bearings. During operation, stainless steel bearings operate stably, have low noise, are corrosion resistant, and are widely used.
Bearings for wind power
Wind power bearings are key components of wind power plants. Based on their location and function in a wind generator, they are mainly divided into yaw bearings, pitch bearings, main shaft bearings, gearbox bearings and generator bearings.

Bearings for agricultural machinery
Bearings for agricultural machinery are the most important basic components of agricultural machinery and are widely used in tractors, balers, combines and other types of agricultural machinery. The precision, performance, service life and reliability of agricultural bearings play a critical role in agricultural machinery.
Automotive bearings-Repair steering gear bearings
Steering gear bearing is a key component of the steering system of an automobile, belongs to the category of steering system bearings, mainly used in the internal structure of the steering wheel of motor vehicles, and has the main function of supporting the steering gear.